Pendahuluan
Siapa pun yang pernah mengerjakan proyek Arduino dengan lebih dari lima sensor pasti pernah mengalami momen frustrasi yang sama: breadboard yang penuh sesak, kabel jumper yang saling bersilang seperti benang kusut, dan satu kabel yang terlepas bisa membuat seluruh sistem tiba-tiba tidak bekerja. Belum lagi risiko hubung singkat yang mengancam keselamatan komponen.
Masalah ini bukan sekadar estetika. Kabel yang tidak teratur adalah sumber kesalahan yang paling umum dalam prototipe elektronik. Dalam lingkungan pendidikan maupun pengembangan produk, ketidakrapian wiring bisa menyebabkan debugging yang memakan waktu berjam-jam hanya untuk menemukan satu kabel yang longgar.
Arduino Sensor Shield V5.0 hadir untuk menyelesaikan masalah ini secara sistematis. Ia bukan sekadar “papan tambahan,” melainkan sebuah infrastruktur sinyal dan daya yang terstandarisasi, yang memungkinkan pengembang fokus pada logika program daripada bergulat dengan fisik rangkaian.
1. Tinjauan Fisik dan Spesifikasi Umum
Sebelum masuk ke fitur teknis, penting untuk memahami dimensi fisik dan kompatibilitas shield ini.
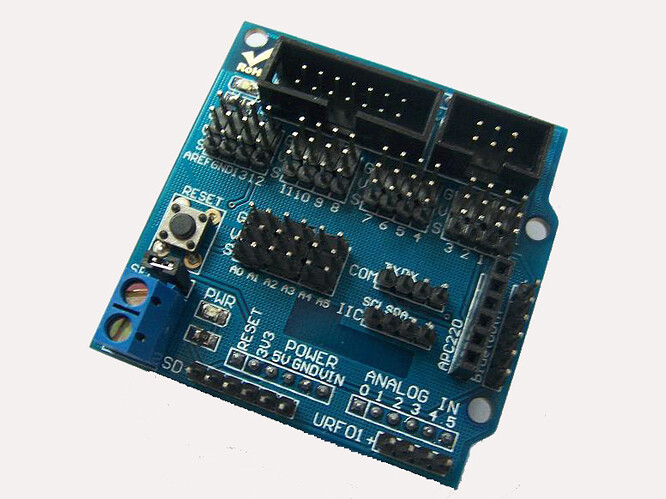
Sensor Shield V5.0 dirancang sebagai plug-in langsung di atas Arduino Uno, menggunakan header pin standar Arduino yang kompatibel dengan soket female shield. Dimensinya persis mengikuti form factor Arduino Uno sehingga tidak ada bagian yang menggantung atau tidak sejajar.
Spesifikasi umum yang perlu diketahui:
Tegangan operasi: 5V DC (dari Arduino atau sumber eksternal) Arus maksimum via Terminal Biru: Bergantung pada kapasitas adaptor eksternal, umumnya mampu menangani hingga 2–3A jika menggunakan modul MB102 dengan adaptor yang memadai. Jumlah pin S-V-G: Mencakup seluruh 14 pin Digital (D0–D13) dan 6 pin Analog (A0–A5) Antarmuka tambahan: I2C, UART, SPI (via SD Card), LCD parallel, dan APC220 radio module Kompatibilitas: Arduino Uno R3, dan sebagian besar varian Uno-compatible board
2. Arsitektur S-V-G: Standarisasi yang Mengubah Cara Kerja
Mengapa S-V-G Penting?
Pada Arduino Uno standar, setiap pin hanya menyediakan satu titik koneksi untuk sinyal. Jika Anda ingin menyambungkan sensor DHT11 misalnya, Anda membutuhkan tiga kabel terpisah: satu ke pin data Arduino, satu ke jalur 5V breadboard, dan satu ke jalur GND breadboard. Setiap lompatan ke breadboard adalah potensi titik kegagalan.
Sensor Shield V5.0 menyelesaikan ini dengan memperluas setiap pin menjadi tiga header berurutan dalam satu blok vertikal:
S (Signal) merupakan jalur yang terhubung langsung ke pin I/O mikrokontroler ATmega328P di dalam Arduino. Sinyal digital maupun analog, PWM, atau komunikasi serial semuanya melewati jalur ini persis seperti jika Anda menancapkan kabel langsung ke Arduino.
V (Voltage) adalah jalur positif bertegangan 5V yang disuplai melalui sistem manajemen daya internal shield. Jalur ini bisa bersumber dari regulator Arduino ataupun dari sumber eksternal, tergantung posisi Jumper SEL yang akan dibahas lebih lanjut.
G (Ground) adalah jalur referensi nol volt yang terhubung ke Ground Arduino. Jalur ini selalu terhubung secara konstan dan tidak dipengaruhi oleh posisi Jumper SEL.
Keuntungan Praktis di Lapangan
Dengan format S-V-G, sebuah servo motor yang memiliki tiga kabel (sinyal kuning/putih, merah VCC, cokelat/hitam GND) dapat langsung ditancapkan secara vertikal ke satu blok header tanpa perlu merutekan kabel ke mana-mana. Hal yang sama berlaku untuk sensor ultrasonik HC-SR04, sensor suhu DHT22, atau sensor cahaya LDR dengan modul.
Hasilnya adalah kabel yang pendek, lurus, dan terpasang kokoh. Ini bukan sekadar kerapian visual, tetapi secara langsung mengurangi impedansi parasitik pada jalur sinyal yang bisa mempengaruhi akurasi pembacaan sensor analog.
3. Sistem Manajemen Daya: Jantung dari Shield Ini
3.1 Terminal Biru: Gerbang Daya Eksternal
Terminal Biru (blue screw terminal) adalah komponen yang paling mudah dikenali pada Sensor Shield V5.0. Terminal ini memiliki dua titik koneksi dengan sekrup pengencang: satu untuk VCC (+) dan satu untuk GND (–).
Terminal ini menggunakan mekanisme screw clamp yang mampu menjepit kabel dengan kuat, jauh lebih andal dibanding kabel jumper yang hanya mengandalkan gesekan. Untuk proyek yang akan sering dipindah-pindah atau dibawa ke lapangan, ini merupakan keunggulan signifikan.
Tegangan yang masuk melalui Terminal Biru akan didistribusikan ke jalur V pada seluruh header S-V-G, tetapi hanya jika Jumper SEL dalam posisi terbuka (dilepas).
3.2 Jumper SEL: Sakelar Dua Dunia
Jumper SEL adalah komponen kecil namun memiliki implikasi teknis yang sangat besar. Posisinya biasanya berada di dekat Terminal Biru dan berlabel “SEL” atau “PWR SEL.”
Kondisi Jumper Terpasang (Short/On):
Ketika jumper terpasang, jalur V pada seluruh header S-V-G dihubungkan langsung ke output 5V regulator internal Arduino Uno. Regulator yang digunakan Arduino Uno (IC AMS1117-5.0 atau setara) memiliki batas arus keluaran sekitar 500–800mA dalam kondisi ideal, dan dalam praktik nyata kemampuannya jauh lebih rendah karena sebagian arus sudah dikonsumsi oleh ATmega328P dan komponen onboard lainnya.
Mode ini aman dan cukup untuk:
- Sensor suhu dan kelembaban (DHT11, DHT22) yang hanya mengonsumsi ~1–2.5mA
- Sensor ultrasonik HC-SR04 dengan konsumsi ~15mA
- Sensor cahaya, PIR, atau sensor sentuh
- Modul relay single-channel dengan beban rendah
- LED indikator
Mode ini tidak aman untuk:
- Motor servo (SG90 saja sudah bisa menarik 500–900mA saat bergerak)
- Motor DC
- Lebih dari 3–4 sensor aktif sekaligus
- Modul dengan backlight intensitas tinggi
Kondisi Jumper Dilepas (Open/Off):
Ketika jumper dilepas, jalur V pada header S-V-G terputus dari Arduino. Jalur V hanya akan aktif jika daya disuplai melalui Terminal Biru. Jalur Ground tetap terhubung, dan jalur S tetap berfungsi normal untuk komunikasi sinyal.
Ini adalah mode yang direkomendasikan untuk hampir semua proyek yang melibatkan aktuator. Dengan cara ini, arus besar yang dibutuhkan motor servo tidak akan pernah mengalir melalui regulator Arduino, sehingga Arduino terlindungi sepenuhnya.
3.3 Mengapa Common Ground Sangat Penting?
Ketika menggunakan dua sumber daya berbeda (Arduino dari USB/adaptor, dan servo dari sumber eksternal via Terminal Biru), salah satu kesalahan fatal yang sering dilakukan pemula adalah tidak menyatukan ground kedua sumber tersebut.
Jika ground tidak terhubung, sinyal PWM yang dikirim Arduino ke servo akan “mengambang” (floating) karena tidak ada referensi tegangan yang sama antara pengirim dan penerima sinyal. Akibatnya, servo bisa bergetar tidak terkontrol, tidak merespons, atau bahkan menarik arus berlebih.
Sensor Shield V5.0 menyelesaikan ini secara otomatis. Secara internal, jalur GND pada Terminal Biru sudah dihubungkan ke jalur GND Arduino melalui copper trace pada PCB shield. Artinya, cukup dengan menancapkan shield ke Arduino dan menghubungkan sumber eksternal ke Terminal Biru, common ground sudah terbentuk secara otomatis tanpa kabel tambahan.
4. Kapasitor Buffer: Komponen Kecil Berdampak Besar
Dalam panduan implementasi dual power, pemasangan kapasitor elektrolitik (elco) 470µF 50V secara paralel pada Terminal Biru adalah langkah yang sering diabaikan oleh pemula, padahal dampaknya sangat signifikan.
Mengapa Diperlukan?
Motor servo adalah beban induktif. Ketika servo menerima perintah untuk bergerak, terutama dari posisi diam ke posisi baru secara mendadak, motor membutuhkan lonjakan arus (inrush current) yang sangat tinggi dalam waktu sangat singkat (milidetik). Lonjakan ini bisa 5–10 kali lebih besar dari konsumsi arus normalnya.
Sumber daya eksternal seperti modul MB102 yang menggunakan adaptor memiliki respons dinamis yang terbatas. Ada jeda kecil antara permintaan arus dan kemampuan sumber untuk memenuhinya. Selama jeda ini, tegangan pada jalur V bisa turun drastis (voltage drop), yang bisa menyebabkan:
- Servo bergerak tersendat atau gemeter
- Reset mendadak pada Arduino akibat tegangan tidak stabil
- Sinyal yang rusak pada sensor lain yang berbagi jalur V
Kapasitor 470µF berfungsi sebagai “bank energi” kecil. Ia menyimpan muatan listrik saat kondisi normal dan melepaskannya secara instan saat terjadi lonjakan permintaan arus, menjembatani jeda respons sumber daya eksternal.
Pemilihan Nilai Kapasitor
Nilai 470µF adalah nilai minimum yang direkomendasikan untuk satu servo. Jika proyek menggunakan dua servo atau lebih, pertimbangkan untuk menggunakan kapasitor 1000µF atau bahkan 2200µF. Tegangan kapasitor (50V dalam contoh ini) dipilih jauh di atas tegangan kerja (5V) untuk memastikan umur panjang dan keamanan kapasitor, karena kapasitor elektrolitik yang dioperasikan mendekati batas tegangannya akan cepat degradasi.
Perhatikan selalu polaritas pemasangan: kaki panjang atau kaki bertanda positif (+) ke jalur VCC, dan kaki pendek atau kaki bertanda strip negatif (–) ke jalur GND. Kapasitor elektrolitik yang terpasang terbalik bisa meledak dan merusak seluruh rangkaian.
5. Antarmuka Komunikasi Terintegrasi
5.1 I2C (Inter-Integrated Circuit)
Header I2C pada Sensor Shield V5.0 menyediakan empat pin dalam satu blok: VCC, GND, SDA, dan SCL. Pin SDA dan SCL pada Arduino Uno secara hardware berada di pin Analog A4 dan A5, dan shield ini mengeluarkannya dalam format yang lebih mudah diakses.
Antarmuka I2C sangat berguna untuk:
- LCD 16×2 dengan modul I2C backpack (PCF8574): Memangkas koneksi dari 6 kabel menjadi hanya 2 kabel data
- Sensor kompas digital HMC5883L atau QMC5883L untuk proyek robotik dan navigasi
- Sensor tekanan barometrik BMP180/BMP280 untuk stasiun cuaca
- Real Time Clock (RTC) DS3231 untuk data logging dengan timestamp
- Sensor akselerometer/giroskop MPU-6050 untuk proyek keseimbangan robot
Keunggulan I2C adalah kemampuannya menghubungkan hingga 127 perangkat hanya dengan dua kabel data, selama setiap perangkat memiliki alamat I2C yang unik.
5.2 UART (Universal Asynchronous Receiver-Transmitter)
Header UART pada shield mengeluarkan pin TX (Transmit) dan RX (Receive) dari Arduino, yang pada Uno standar berada di pin D0 dan D1. Header ini dilengkapi VCC dan GND sehingga modul bisa langsung terhubung.
Aplikasi umum:
- Modul Bluetooth HC-05 atau HC-06 untuk kontrol wireless dari smartphone
- Modul GPS NEO-6M atau NEO-8M untuk proyek tracking dan navigasi
- Modul GSM SIM800L untuk proyek IoT dengan konektivitas seluler
Catatan penting: Karena pin D0 dan D1 juga digunakan untuk komunikasi USB (saat upload program atau Serial Monitor), pastikan untuk melepas modul UART setiap kali ingin meng-upload sketch baru ke Arduino, atau gunakan library SoftwareSerial untuk mengalihkan komunikasi serial ke pin lain.
5.3 Antarmuka SD Card
Sensor Shield V5.0 menyediakan header dengan pinout yang kompatibel dengan modul SD Card standar berbasis SPI. Pin yang terlibat adalah MOSI (D11), MISO (D12), SCK (D13), dan CS (biasanya D4 atau D10). Dengan modul ini, proyek data logging menjadi sangat praktis, misalnya untuk merekam pembacaan sensor suhu setiap 10 detik ke file CSV.
5.4 Header APC220
Beberapa varian Sensor Shield V5.0 juga menyertakan header khusus untuk modul radio APC220, yang memungkinkan komunikasi wireless jarak jauh (hingga 1km dalam kondisi ideal) tanpa infrastruktur WiFi. Ini berguna untuk proyek remote monitoring di area terbuka.
6. Panduan Implementasi Lengkap: Sistem Multi-Servo dengan Dual Power
Skenario
Kita akan membangun sistem kendali dua servo (SG90 dan MG90S) menggunakan Arduino Uno dan Sensor Shield V5.0, dengan sumber daya eksternal dari modul MB102 yang disuplai adaptor 5V 2A.
Persiapan Komponen
Yang dibutuhkan adalah Arduino Uno, Sensor Shield V5.0, dua unit servo motor (SG90 dan MG90S), modul power MB102 beserta adaptor 5V 2A, kapasitor elektrolitik 1000µF 25V (karena dua servo), kabel servo, dan kabel jumper secukupnya.
Langkah Implementasi
Langkah 1 – Pemasangan Shield: Tancapkan Sensor Shield V5.0 di atas Arduino Uno. Pastikan semua pin header masuk dengan sejajar dan tidak ada pin yang bengkok atau melewati lubang yang salah.
Langkah 2 – Konfigurasi Jumper SEL: Lepas Jumper SEL dari posisinya. Simpan jumper di tempat yang aman karena komponennya kecil dan mudah hilang. Dengan jumper terlepas, jalur V pada header S-V-G tidak lagi terhubung ke Arduino.
Langkah 3 – Koneksi Sumber Eksternal: Hubungkan output 5V dari modul MB102 ke Terminal Biru. Pastikan polaritas benar: kabel merah (VCC) ke terminal bertanda (+) dan kabel hitam (GND) ke terminal bertanda (–). Kencangkan sekrup terminal dengan obeng kecil.
Langkah 4 – Pemasangan Kapasitor Buffer: Pasang kapasitor 1000µF secara paralel langsung pada Terminal Biru. Kaki positif kapasitor ke terminal (+) dan kaki negatif ke terminal (–). Pastikan kapasitor tidak menyentuh komponen lain pada PCB.
Langkah 5 – Koneksi Servo: Hubungkan servo pertama ke header S-V-G pada pin D9 dan servo kedua ke pin D10. Konektor servo berwarna tiga kabel langsung ditancapkan vertikal: kabel sinyal ke baris S, kabel merah ke baris V, dan kabel cokelat/hitam ke baris G.
Langkah 6 – Koneksi Daya Arduino: Hubungkan Arduino ke komputer via USB atau gunakan adaptor terpisah melalui jack DC Arduino. Arduino dan servo kini memiliki sumber daya yang terpisah namun berbagi ground yang sama.
Kode Program Sederhana
#include <Servo.h>
Servo servo1;
Servo servo2;
void setup() {
servo1.attach(9);
servo2.attach(10);
}
void loop() {
// Gerakkan kedua servo dari 0 ke 180 derajat
for (int pos = 0; pos <= 180; pos++) {
servo1.write(pos);
servo2.write(180 - pos); // Bergerak berlawanan arah
delay(15);
}
// Kembali dari 180 ke 0 derajat
for (int pos = 180; pos >= 0; pos--) {
servo1.write(pos);
servo2.write(180 - pos);
delay(15);
}
}
7. Troubleshooting Umum
Servo bergetar atau tidak merespons meskipun rangkaian sudah benar. Periksa apakah Jumper SEL sudah benar-benar terlepas. Terkadang jumper masih tertancap sebagian dan menciptakan koneksi parsial. Periksa juga apakah kapasitor buffer sudah terpasang dengan polaritas yang benar.
Arduino restart sendiri saat servo bergerak. Ini indikasi bahwa ground belum tersambung dengan baik antara sumber eksternal dan Arduino, atau adaptor 5V tidak mampu menyuplai arus yang cukup. Coba gunakan adaptor dengan rating arus yang lebih tinggi (minimal 2A untuk dua servo).
Sensor analog memberikan pembacaan yang tidak stabil. Ini bisa disebabkan oleh noise elektromagnetik dari motor servo. Tambahkan kapasitor 100nF (ceramic) secara paralel pada pin VCC dan GND sensor analog untuk filtering noise frekuensi tinggi.
Tidak bisa upload program ke Arduino. Lepas semua modul yang terhubung ke pin D0 (RX) dan D1 (TX), kemudian coba upload ulang. Perangkat yang aktif pada pin serial akan mengganggu proses komunikasi antara IDE dan Arduino.
8. Perbandingan dengan Metode Breadboard Konvensional
| Aspek | Breadboard Konvensional | Sensor Shield V5.0 |
|---|---|---|
| Waktu perakitan | 15–30 menit untuk 4 sensor | 3–5 menit untuk 4 sensor |
| Risiko kabel lepas | Tinggi | Sangat rendah |
| Manajemen daya | Manual, rawan kesalahan | Terstruktur via Jumper SEL |
| Common ground | Perlu kabel tambahan | Otomatis |
| Portabilitas | Rendah | Tinggi |
| Biaya | Rp 15.000 – Rp 30.000 | Rp 35.000 – Rp 70.000 |
9. Best Practice dan Rekomendasi Penggunaan
Selalu mulai dengan Jumper SEL dilepas jika ragu tentang konsumsi arus komponen Anda. Lebih baik menambahkan sumber eksternal yang tidak diperlukan daripada merusak regulator Arduino.
Beri label pada setiap koneksi servo atau sensor menggunakan selotip kecil atau label cetak. Ketika proyek berkembang dan header S-V-G mulai penuh, identifikasi visual akan sangat membantu proses debugging.
Untuk proyek permanen atau yang akan dipresentasikan, pertimbangkan untuk mengamankan kabel servo dengan cable tie atau selongsong spiral agar tampilan lebih profesional. Shield sudah menyediakan fondasi yang rapi; sedikit tambahan manajemen kabel akan membuat hasilnya tampak setara dengan produk komersial.
Jika menggunakan lebih dari tiga servo besar (MG90S ke atas), pertimbangkan untuk menggunakan power supply desktop yang bisa memberikan arus 5A atau lebih, bukan hanya modul MB102.
Kesimpulan
Arduino Sensor Shield V5.0 merepresentasikan pendekatan yang lebih matang dalam pengembangan prototipe berbasis Arduino. Dengan standarisasi S-V-G, sistem manajemen daya dual-rail melalui Jumper SEL dan Terminal Biru, serta dukungan antarmuka komunikasi yang lengkap, shield ini mengangkat kualitas prototipe dari sekadar “rangkaian percobaan” ke tingkat yang mendekati standar pengembangan produk.
Bagi siswa dan mahasiswa, mempelajari penggunaan shield ini sejak dini berarti membangun kebiasaan berpikir sistematis tentang distribusi daya dan manajemen sinyal, dua konsep yang menjadi fondasi dalam desain sistem elektronik profesional di industri nyata.